At some point during this build, I did the thing you’re not supposed to do mid-project: I scrolled too far down an ArduPilot documentation page.
Buried between autopilot tables and compatibility notes was a single word next to my flight controller:
Not “unsupported.” Not “deprecated.” Just… discontinued.
Discontinued.
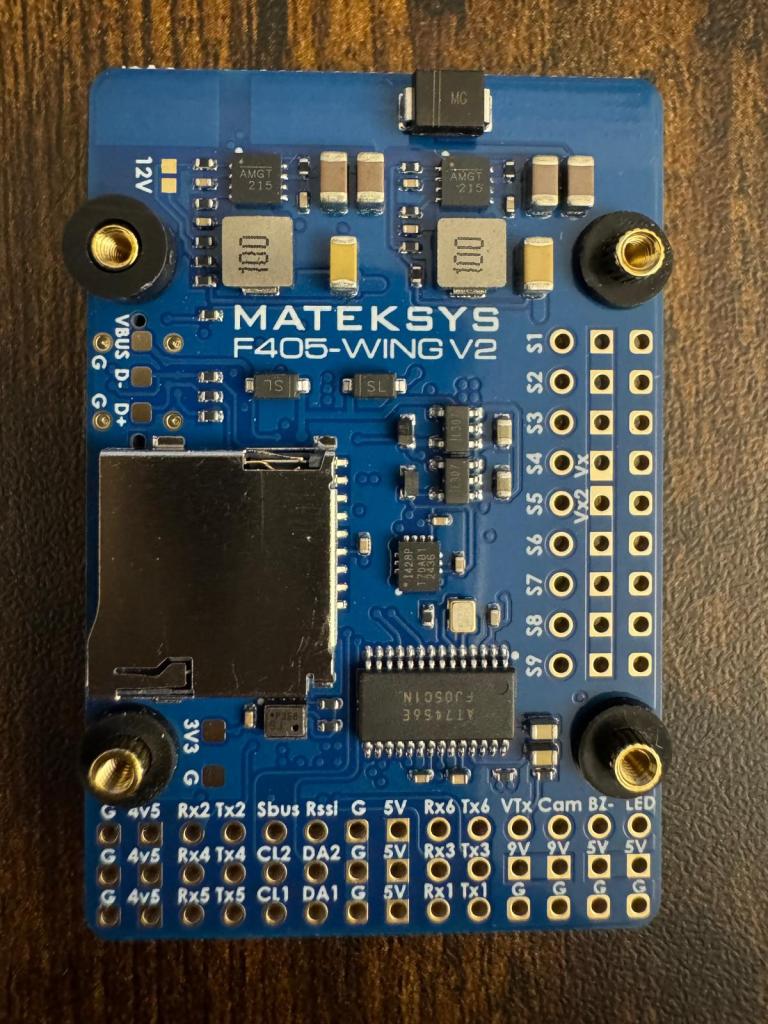
At first, it didn’t feel like a big deal. The Matek F405-Wing is everywhere. It’s still sold. People still fly it. Forums are full of wiring diagrams, setup guides, and confident advice that starts with “I’ve been using this board for years.”
So what does discontinued actually mean in the context of ArduPilot, STM32-based flight controllers, and a modern fixed-wing UAV build?
It turns out: quite a lot.
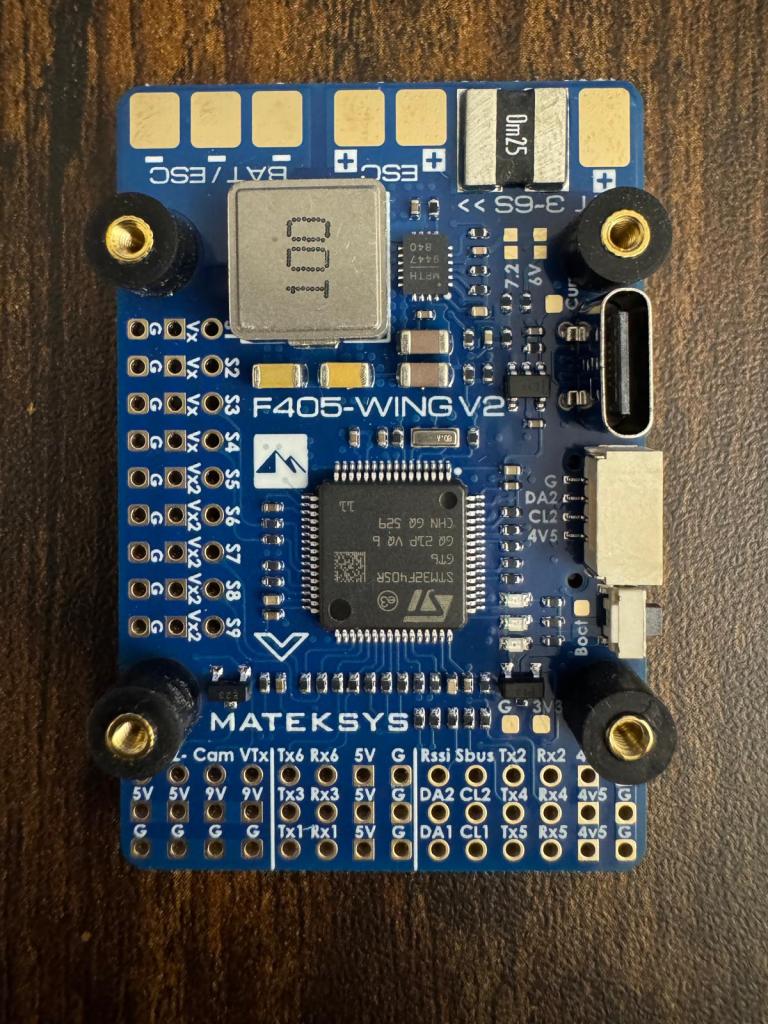
The F405-Wing is based on an STM32F405 MCU — a chip that was never designed with modern ArduPilot feature creep in mind. As ArduPilot evolved, the firmware grew: more sensors, more safety checks, more logging, more abstraction layers. Eventually, the math stopped working. Flash space became tight. RAM margins disappeared. Entire features had to be compiled out just to make the firmware fit.
That’s the quiet part no one says out loud.
When a board like the F405-Wing is marked discontinued, it doesn’t mean it suddenly stops flying. It means the future stops being designed around it. New features are optional. Edge cases don’t get tested. Documentation slowly shifts to assume Pixhawk-class hardware with standardized connectors, predictable power rails, and robust bootloaders.
You feel this immediately when something goes wrong.
In my case, the board entered a state where it was technically alive — LEDs lit, DFU mode accessible — but operationally mute. Mission Planner couldn’t connect. USB behavior was inconsistent. Recovery required flashing firmware through STM32 tools instead of the ground station that ArduPilot documentation assumes you’re using.
That’s the real cost of discontinued hardware: when you fall off the happy path, you’re on your own.
There’s also a tooling mismatch. Modern ArduPilot workflows are built around Pixhawk conventions: standardized power modules, known USB descriptors, predictable serial mappings. The Matek F405-Wing can work with ArduPilot, but it doesn’t behave like the reference platform ArduPilot is written and tested against. Every deviation becomes friction.
None of this makes the F405-Wing a bad board. In fact, it’s impressively capable for its size and price. But it does mean you’re signing up for a different role: part pilot, part firmware archaeologist.
If your goal is to understand how bootloaders work, how DFU mode interacts with USB drivers, and how much complexity hides behind the word “compatible,” the Matek will teach you quickly.
If your goal is to build a reliable long-range UAV without turning every setup step into an investigation, discontinued starts to matter a lot.
This was the moment I realized I wasn’t debugging my aircraft anymore. I was debugging my assumptions about the platform underneath it.
And that realization is what pushed me toward Pixhawk-class hardware — not because it’s more powerful, but because it’s boring in exactly the right ways.
Which, as it turns out, is what you want from the thing keeping your airplane in the air.

Leave a comment